Publications
publications by categories in reversed chronological order. generated by jekyll-scholar.
2024
-
 In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Jun 2024
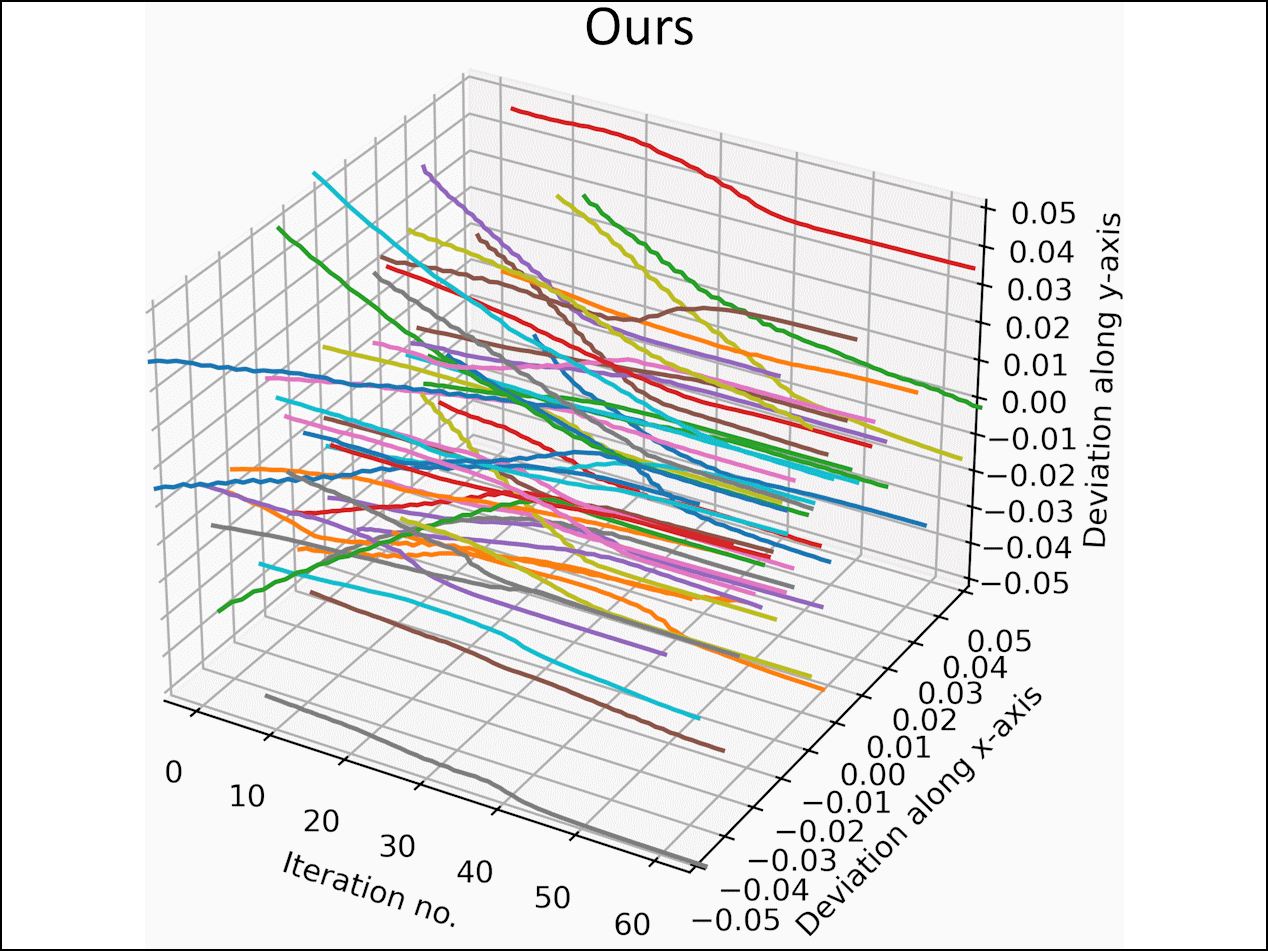
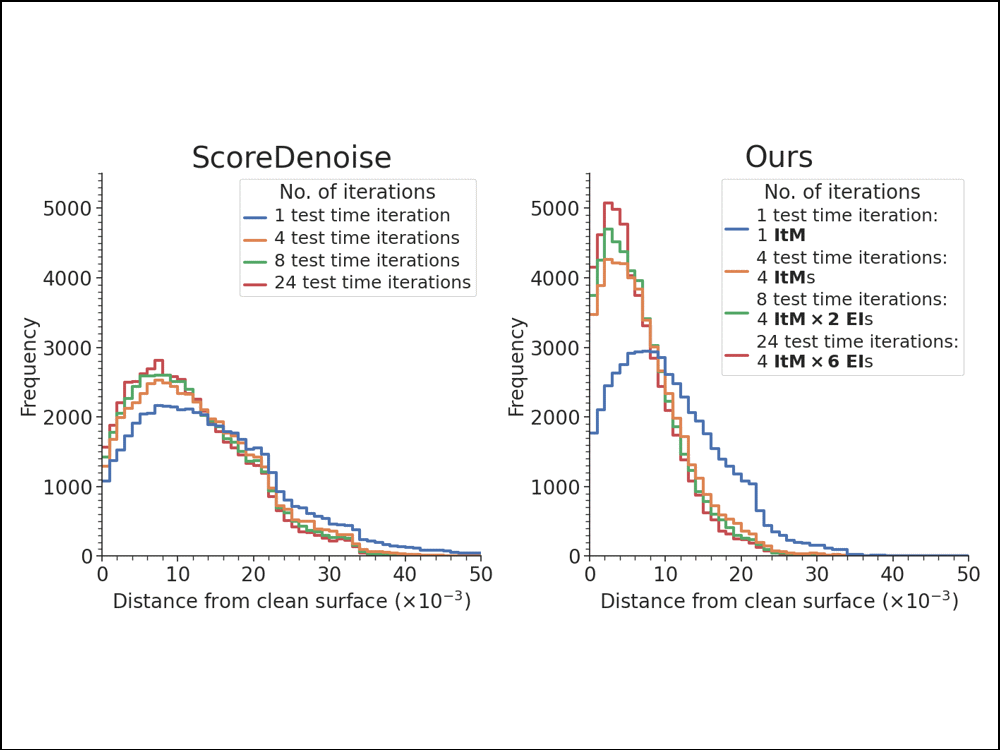
In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Jun 2024Point cloud filtering is a fundamental 3D vision task, which aims to remove noise while recovering the underlying clean surfaces. State-of-the-art methods remove noise by moving noisy points along stochastic trajectories to the clean surfaces. These methods often require regularization within the training objective and/or during post-processing, to ensure fidelity. In this paper, we introduce StraightPCF, a new deep learning based method for point cloud filtering. It works by moving noisy points along straight paths, thus reducing discretization errors while ensuring faster convergence to the clean surfaces. We model noisy patches as intermediate states between high noise patch variants and their clean counterparts, and design the VelocityModule to infer a constant flow velocity from the former to the latter. This constant flow leads to straight filtering trajectories. In addition, we introduce a DistanceModule that scales the straight trajectory using an estimated distance scalar to attain convergence near the clean surface. Our network is lightweight and only has ∼530K parameters, being 17% of IterativePFN (a most recent point cloud filtering network). Extensive experiments on both synthetic and real-world data show our method achieves state-of-the-art results. Our method also demonstrates nice distributions of filtered points without the need for regularization. The implementation code can be found at: https://github.com/ddsediri/StraightPCF.
@inproceedings{edirimuni2024straightpcf, title = {StraightPCF: Straight Point Cloud Filtering}, author = {de Silva Edirimuni, Dasith and Lu, Xuequan and Li, Gang and Wei, Lei and Robles-Kelly, Antonio and Li, Hongdong}, booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)}, month = jun, year = {2024}, pages = {}, doi = {}, url = {https://ddsediri.github.io/projects/StraightPCF/}, } -
 IEEE Transactions on Visualization and Computer Graphics, Jun 2024
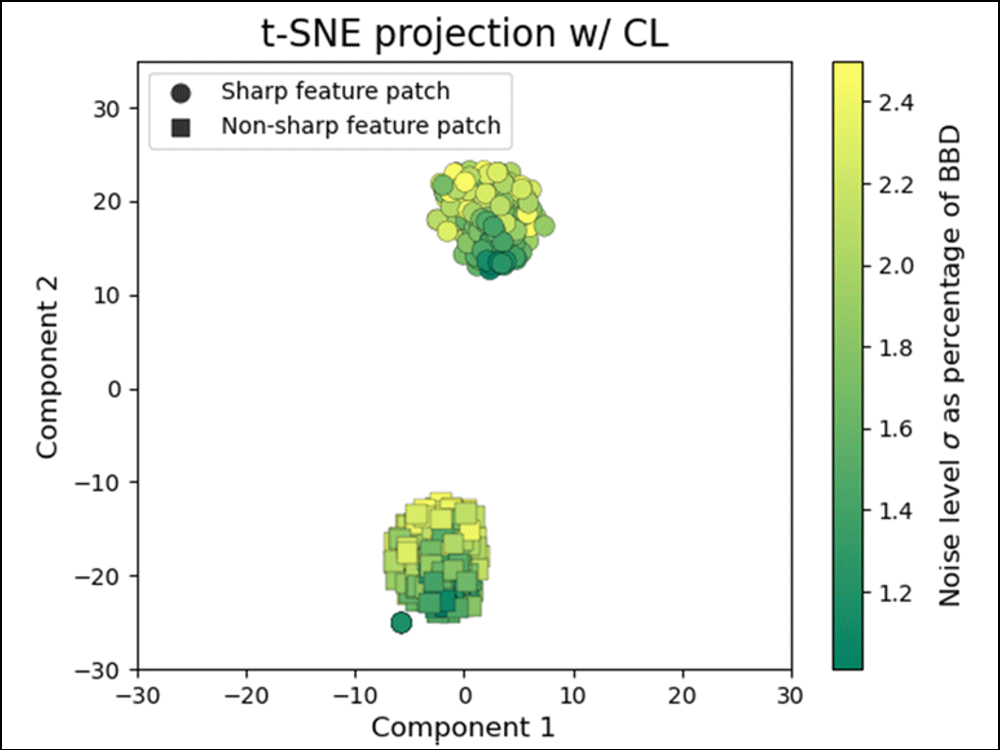
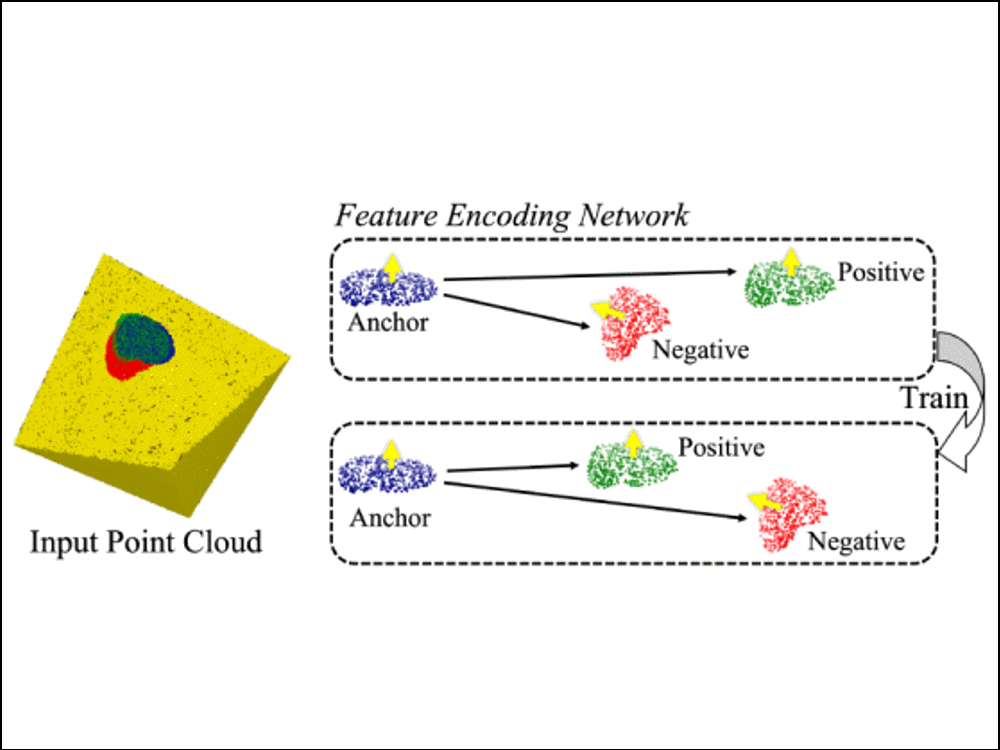
IEEE Transactions on Visualization and Computer Graphics, Jun 2024Point cloud filtering and normal estimation are two fundamental research problems in the 3D field. Existing methods usually perform normal estimation and filtering separately and often show sensitivity to noise and/or inability to preserve sharp geometric features such as corners and edges. In this paper, we propose a novel deep learning method to jointly estimate normals and filter point clouds. We first introduce a 3D patch based contrastive learning framework, with noise corruption as an augmentation, to train a feature encoder capable of generating faithful representations of point cloud patches while remaining robust to noise. These representations are consumed by a simple regression network and supervised by a novel joint loss, simultaneously estimating point normals and displacements that are used to filter the patch centers. Experimental results show that our method well supports the two tasks simultaneously and preserves sharp features and fine details. It generally outperforms state-of-the-art techniques on both tasks.
@article{edirimuni2022contrastive, author = {de Silva Edirimuni, Dasith and Lu, Xuequan and Li, Gang and Robles-Kelly, Antonio}, journal = {IEEE Transactions on Visualization and Computer Graphics}, title = {Contrastive Learning for Joint Normal Estimation and Point Cloud Filtering}, year = {2024}, volume = {30}, number = {8}, pages = {4527-4541}, doi = {10.1109/TVCG.2023.3263866}, url = {https://ieeexplore.ieee.org/document/10091230}, }
2023
-
 In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Jun 2023
In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Jun 2023The quality of point clouds is often limited by noise introduced during their capture process. Consequently, a fundamental 3D vision task is the removal of noise, known as point cloud filtering or denoising. State-of-the-art learning based methods focus on training neural networks to infer filtered displacements and directly shift noisy points onto the underlying clean surfaces. In high noise conditions, they iterate the filtering process. However, this iterative filtering is only done at test time and is less effective at ensuring points converge quickly onto the clean surfaces. We propose IterativePFN (iterative point cloud filtering network), which consists of multiple IterationModules that model the true iterative filtering process internally, within a single network. We train our IterativePFN network using a novel loss function that utilizes an adaptive ground truth target at each iteration to capture the relationship between intermediate filtering results during training. This ensures that the filtered results converge faster to the clean surfaces. Our method is able to obtain better performance compared to state-of-the-art methods. The source code can be found at https://github.com/ddsediri/IterativePFN.
@inproceedings{edirimuni2023iterativepfn, title = {IterativePFN: True Iterative Point Cloud Filtering}, author = {de Silva Edirimuni, Dasith and Lu, Xuequan and Shao, Zhiwen and Li, Gang and Robles-Kelly, Antonio and He, Ying}, booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)}, month = jun, year = {2023}, pages = {13530-13539}, doi = {10.1109/CVPR52729.2023.01300}, url = {https://ddsediri.github.io/projects/IterativePFN/}, }
2022
-
 In 2022 IEEE International Conference on Multimedia and Expo (ICME), Jun 2022
In 2022 IEEE International Conference on Multimedia and Expo (ICME), Jun 2022Current normal estimation methods for 3D point clouds often show limited accuracy in predicting normals at sharp features (e.g., edges and corners) and less robustness to noise. In this paper, we propose a novel normal estimation method for point clouds which consists of two phases: (a) feature encoding to learn representations of local patches, and (b) normal estimation that takes the learned representation as input and regresses the normal vector. We are motivated that local patches on isotropic and anisotropic surfaces respectively have similar and distinct normals, and these separable features or representations can be learned to facilitate normal estimation. To realise this, we design a triplet learning network for feature encoding and a normal estimation network to regress normals. Despite having a smaller network size compared with most other methods, experiments show that our method preserves sharp features and achieves better normal estimation results especially on computer-aided design (CAD) shapes.
@inproceedings{wang2022triplet, author = {Wang, Weijia and Lu, Xuequan and de Silva Edirimuni, Dasith and Liu, Xiao and Robles-Kelly, Antonio}, booktitle = {2022 IEEE International Conference on Multimedia and Expo (ICME)}, title = {Deep Point Cloud Normal Estimation Via Triplet Learning}, year = {2022}, volume = {}, number = {}, pages = {1-6}, doi = {10.1109/ICME52920.2022.9859844}, url = {https://doi.org/10.1109/ICME52920.2022.9859844}, }
2019
-
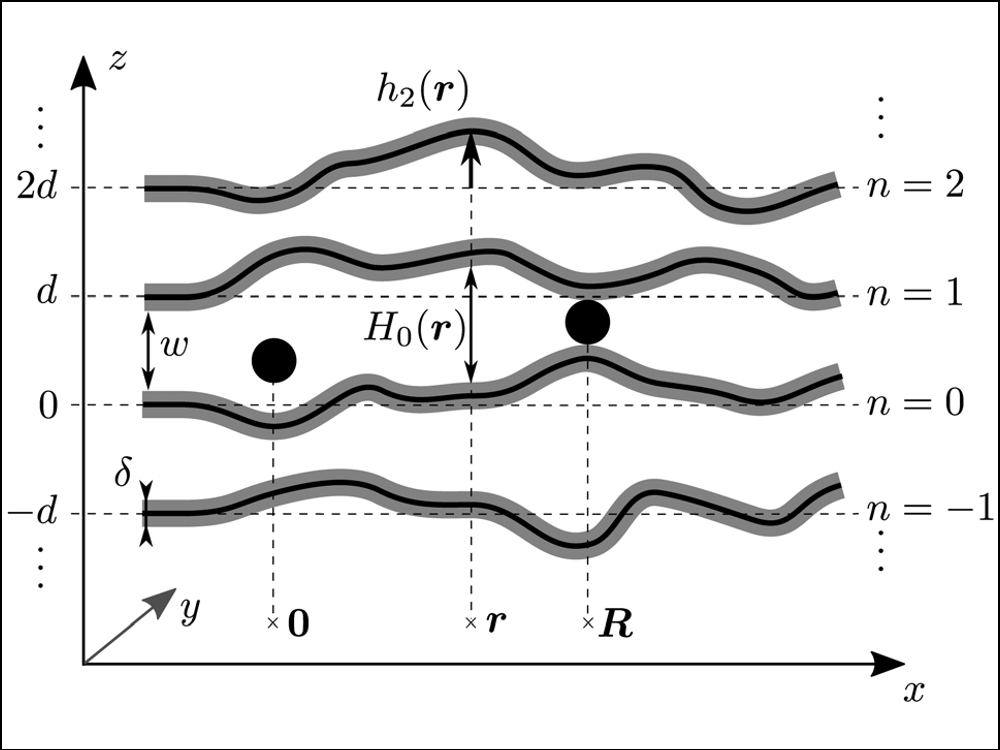 Ruben Zakine, Dasith de Silva Edirimuni, Doru Constantin, Paolo Galatola, and Jean-Baptiste FournierSoft Matter, Jun 2019
Ruben Zakine, Dasith de Silva Edirimuni, Doru Constantin, Paolo Galatola, and Jean-Baptiste FournierSoft Matter, Jun 2019Within the framework of a discrete Gaussian model, we present analytical results for the interaction induced by a lamellar phase between small embedded colloidal particles. We consider the two limits of particles strongly adherent to the adjacent membranes and of particles impenetrable to the membranes. Our approach takes into account the finite size of the colloidal particles, the discrete nature of the layers, and includes the Casimir-like effect of fluctuations, which is very important for dilute phases. Monte Carlo simulations of the statistical behavior of the membrane-interacting colloidal particles account semi-quantitatively, without any adjustable parameters, for the experimental data measured on silica nanospheres inserted within lyotropic smectics. We predict the existence of finite-size and densely packed particle aggregates originating from the competition between attractive interactions between colloidal particles in the same layer and repulsion between colloidal particles one layer apart.
@article{zakine2019lamellar, author = {Zakine, Ruben and de Silva Edirimuni, Dasith and Constantin, Doru and Galatola, Paolo and Fournier, Jean-Baptiste}, title = {Interaction and structuration of membrane-binding and membrane-excluding colloidal particles in lamellar phases}, journal = {Soft Matter}, year = {2019}, volume = {15}, issue = {21}, pages = {4351-4362}, publisher = {The Royal Society of Chemistry}, doi = {10.1039/C9SM00230H}, url = {http://dx.doi.org/10.1039/C9SM00230H}, }