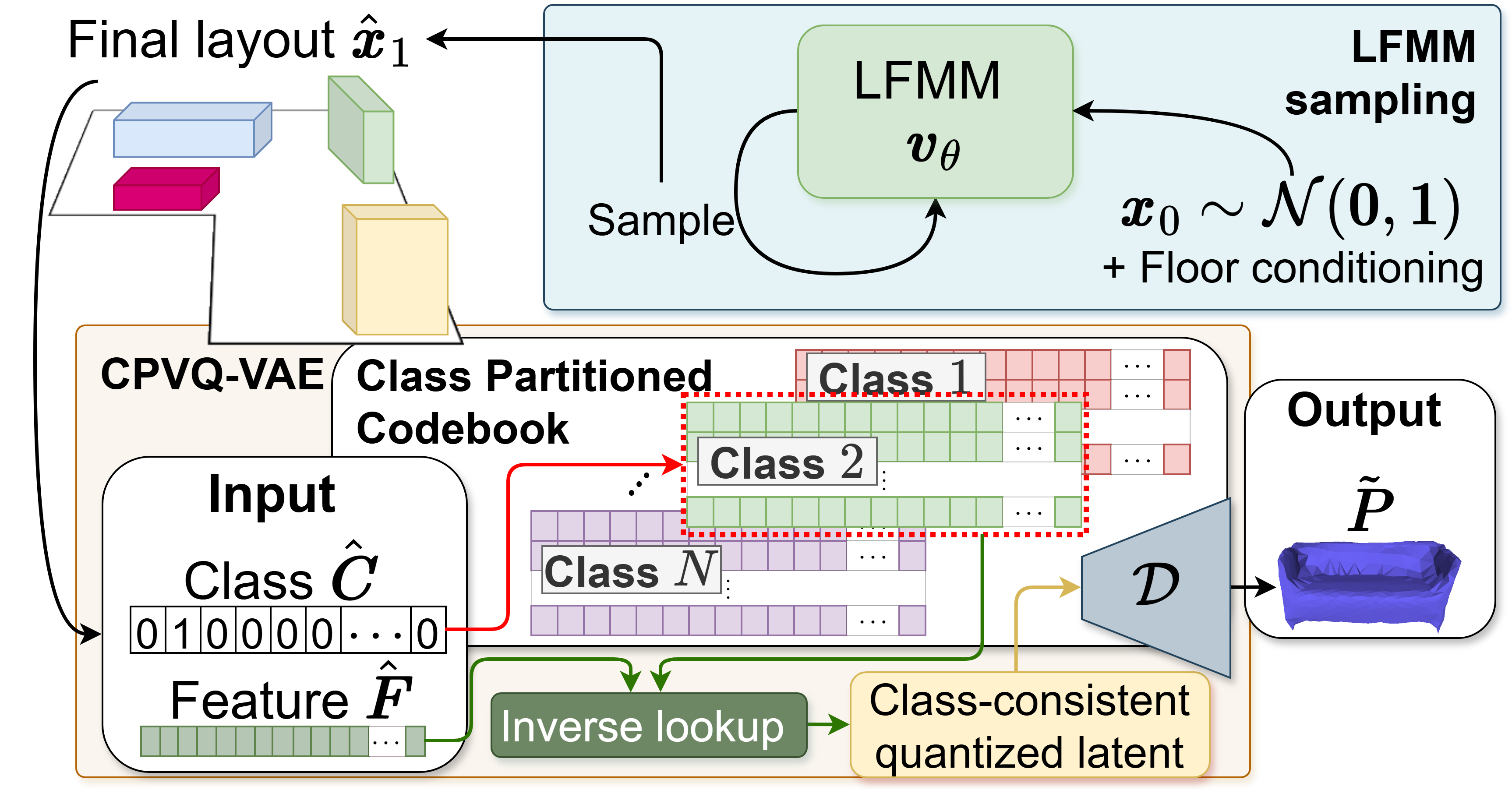
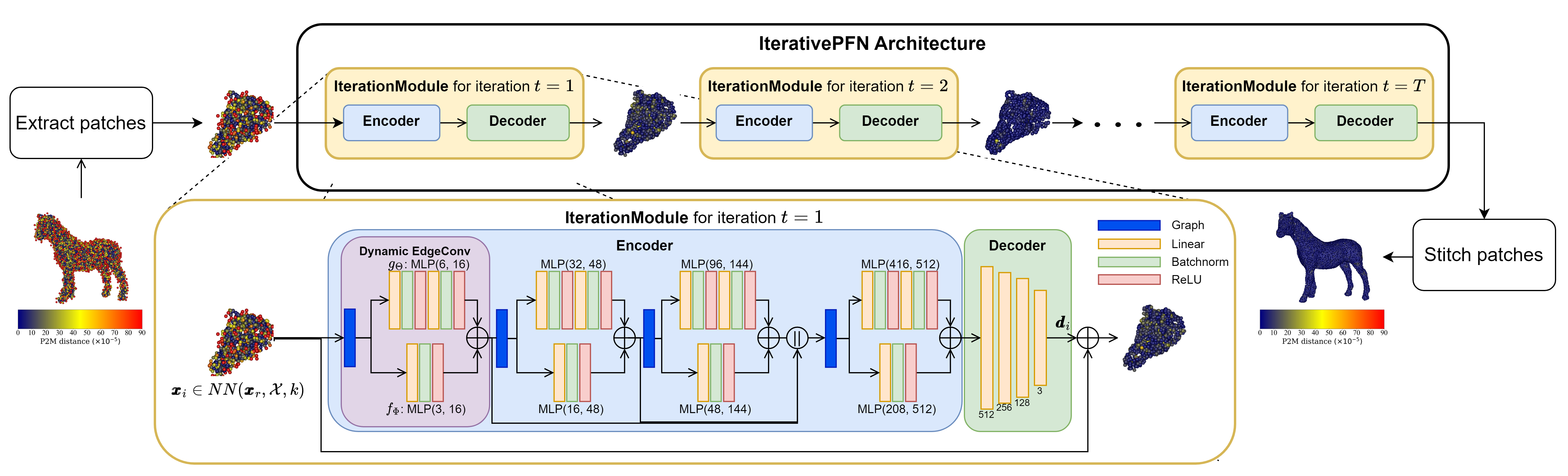
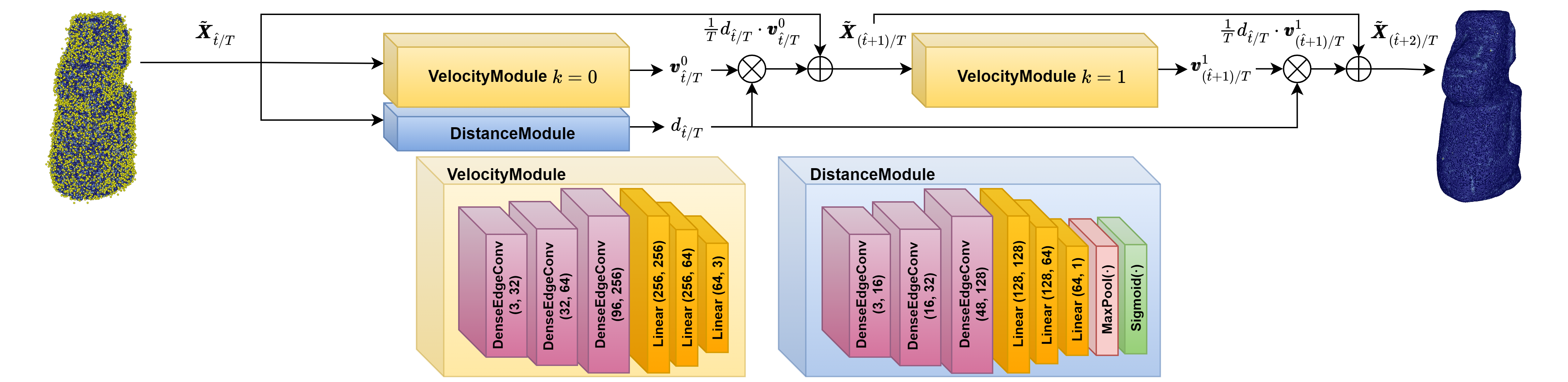
Point Cloud Generation Class-Partitioned VQ-VAE and Latent Flow Matching for Point Cloud Scene Generation A new method that generates varied multi-object point cloud scenes using latent flow matching and a novel class-partition VQ-VAE. Accepted to AAAI, 2026 Point Cloud Filtering IterativePFN: True Iterative Point Cloud Filtering A neural network architecture that internally models the iterative filtering process and gradually removes noise from point clouds. Accepted to CVPR, 2023 StraightPCF: Straight Point Cloud Filtering A new method that models noisy patches as intermediate states in a filtering process that moves points along straight flows. Accepted to CVPR, 2024